ARToolKit – rozšířená realita
V tomto článku bych chtěl popsat, co je ARToolKit, jak funguje, co umí, jak se v něm programuje a jak se instaluje. Obsah článku je převzat z mého školního projektu do předmětu GZN. Více o ARToolKit se můžete dozvědět na oficiálních stránkách projektu.
Úvod
ARToolKit je knihovna, která umožňuje programovat aplikace s rozšířenou realitou (augmented reality). Jedná se o nástroj počítačového vidění, který snímá v reálném čase obraz pomocí videokamery a dokáže vypočítat pozici, vzdálenost a rotaci kamery vzhledem k daným objektům, které jsou označeny speciálními značkami (markers). Výsledkem je reálný obraz s dokreslenou virtuální (rozšířenou) realitou ve 3D. 3D objekty se obvykle vykreslují na trasovací značky a překrývají je. Trasovacích značek může být ve scéně použito více.
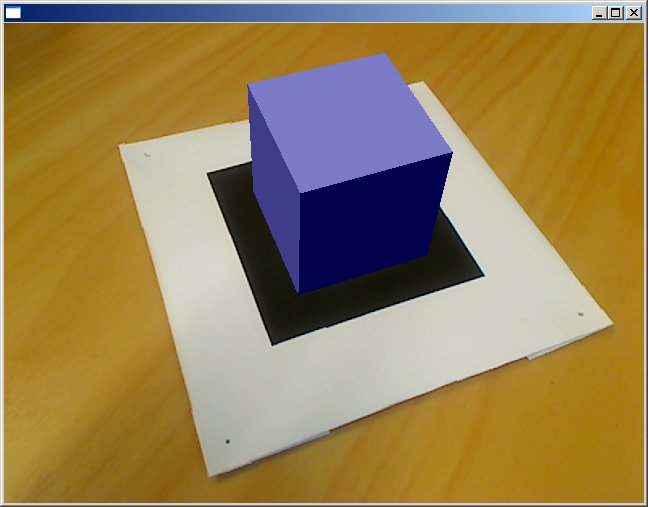
Pro lepší představu uvedeme příklad. Na obrázku 1 níže je modrá virtuální krychle, která stojí na skutečné papírové podložce, na které je vytištěna speciální trasovací značka s identifikačním symbolem. Obraz snímá v reálném čase kamera. Když uživatel posune či otočí značku, krychle se pohne s ní. Když uživatel posune značku mimo zorný úhel kamery, krychle zmizí.
V následujícím textu se některé uvedené názvy/cesty k souborům ARToolKit vztahují k ukázkovým příkladům pro OS Windows (Visual Basic).
Historie
Knihovnu ARToolKit vyvinul Japonec Dr. Hirokazu Kato z Nara Institute of Science and Technology v roce 1999. Vydána byla jako opensource Univerzitou ve Washingtonu. Nyní je vývoj pozastaven a poslední dostupná verze knihovny je z května 2007.
Co ARToolKit umí?
- rozpoznávání trasovacích značek
- trasování pozice a rotace kamery metodami počítačového vidění
- kalibrace kamery
- zpracování obrazu v reálném čase
- knihovna zajišťující zpracování videa
- ARToolKit je napsán v jazyce C/C++
- podpora OpenGL, GLUT a VRML (OpenVRML) pro vykreslování virtuálního obrazu
- podpora více OS (Linux, MS Windows, Mac OS X) a mobilních platforem (Android, Symbian, iPhone)
- podpora 3D virtuálních brýlí
- řada nástrojů a příkladů
- mnoho mutací (pro Flash, Silverlight, Virtual machines, OpenSceneGraph atd.)
Jak ARToolKit funguje?
Základní princip
Hlavním problémem při vývoji aplikací s rozšířenou realitou je správně najít a trasovat zorný úhel pozorovatele (videokamery). Aplikace potřebuje znát přesnou pozici videokamery vůči značkám, aby byla schopna určit zorný bod, ze kterého se bude vykreslovat virtuální obraz. Jakmile je známa pozice videokamery, která se vypočte podle polohy a natočení značek, virtuální kamera může být umístěna do stejného bodu jako ta reálná a poté je možno vykreslit 3D modely přesně na místa značek. ARToolKit používá pro trasování pozice kamery algoritmy počítačového vidění, které jsou schopny počítat rychle v reálném čase. Výsledky jsou však závislé na použitém hardware a videokameře.
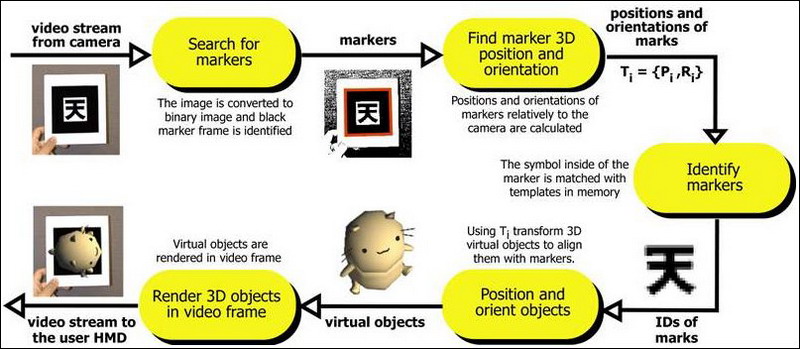
Fáze zpracování obrazu v reálném čase
- Videokamera sejme snímek a pošle jej počítači ke zpracování.
- Program v počítači zpracuje snímek z videa, převede jej pomocí prahování na černo-bílý obraz a najde v něm všechny černé čtverhranné tvary, které odpovídají vzorům trasovacích značek.
- Pokud jsou nějaké značky detekovány, program vypočítá pozici a rotaci kamery vůči trasovacím značkám.
- Jakmile je známa poloha kamery, virtuální 3D grafika může být vykreslena ze stejné pozice.
- Virtuální grafika je vykreslena přes reálný snímek z videokamery a objekty se zobrazí přesně na místa trasovacích značek.
Omezení
ARToolKit má určitá omezení, které je potřeba při vývoji aplikací s rozšířenou realitou brát v úvahu.
- Virtuální objekty se objeví pouze tehdy, kdy jsou příslušné trasovací značky plně viditelné ze strany pozorovatele (videokamery). Pokud je část značky zakryta, nelze ji rozpoznat.
- Správná detekce trasovacích značek ve videu je závislá na světelných podmínkách ve scéně. Při špatném osvětlení nemusí být značky v prahovaném obraze detekovány. Rušit mohou i odlesky světla na značkách. Problémy se světlem lze částečně redukovat nastavením vhodného prahu.
- Správná detekce značek je rovněž závislá na naklonění značek vůči pozorovateli (videokameře). Čím více je značka nakloněna, tím hůře se rozpoznává.
- Při tvorbě vlastních značek je důležité zvolit vhodné symboly. Platí, že čím jednodušší, tím lepší a tím snadněji se správně rozpozná. Nejvhodnější jsou značky s velkými černými a bílými místy (s nízkou frekvencí). Komplexnější vzory jsou z větší dálky hůře detekovány a můžou zkrátit rozlišovací vzdálenost až o polovinu. V tabulce 1 jsou znázorněny přibližné rozlišovací vzdálenosti trasovacích značek, které byly experimentálně zjištěny.
| Velikost značky [cm] | Max. použitelná vzdálenost [cm] |
| 7.0 | 40.6 |
| 8.9 | 63.5 |
| 10.8 | 86.4 |
| 18.7 | 127 |
Tabulka 1: Rozlišovací vzdálenost trasovacích značek o různé velikosti.
Kalibrace kamery
Nastavení a parametry videokamery jsou uloženy v binárním souboru camera_para.dat (v adresáři bin/Data). Konfigurace kamery se zpracuje při každém spuštění aplikace ARToolKit.
ARToolKit používá implicitně soubor camera_para.dat s výchozím nastavením. Rovněž však umožňuje kalibraci jakékoliv kamery a vytvoření vlastního konfiguračního souboru. To je vhodné zejména pro kamery s atypickými objektivy (např. rybí oko). Kalibrace zajistí přesnější výpočty polohy videokamery pro vykreslení virtuální scény a redukuje zkreslení. Pro správné provedení kalibrace bude potřeba vytisknout vzory calib_dist a calib_cpara (z adresáře patterns), s kterými budeme pracovat podobně jako se značkami. K dispozici jsou dva kalibrační postupy.
- Dvoukroková kalibrace - složitější použití, ale lepší výsledky. Vhodnější pro 3D měření.
- Jednokroková kalibrace - jednodušší použití, méně přesná.
Přesnost trasování objektů
ARToolKit umí stabilizovat trasování objektů pomocí funkce historie. Tato stabilizace redukuje chvění virtuálních objektů, protože při výpočtu polohy objektu se využívá průměr několika předchozích poloh. Tímto je zajištěna větší stabilita, ale horší přesnost. Historii lze použít rovněž i při detekci značek. Výpočet je potom o něco rychlejší a stabilnější, ale opět méně přesný.
Trasovací značky
Metody trasování
Trasovací značky jsou speciální vzory, obvykle vytištěné na papíru, pomocí kterých se trasují virtuální objekty rozšířené reality. Je to jedna z metod, jak lze trasovat vrstvu rozšířené reality. Tato metoda využívá počítačové vidění. Další možnou metodou trasování můžou být např. polohovací senzory (GPS, kompas, akcelerometr), které jsou dostupné zpravidla na moderních mobilních zařízeních.
Podoba trasovacích značek
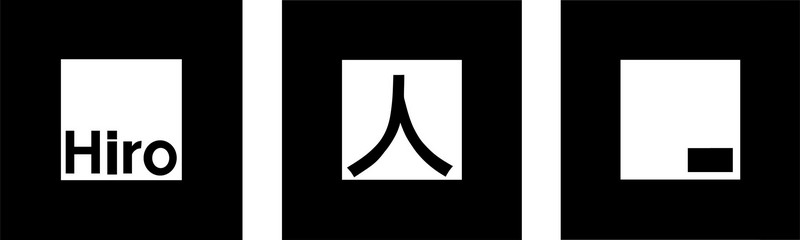
Z polohy značek ve video obrazu se vypočítává pozice a rotace kamery. Značky v ARToolKit mají čtvercový tvar. Tvoří je černobílý symbol s černým okrajem o šířce, která je rovna polovině šířky vnitřní plochy se symbolem. Vnitřní symbol je černý na bílém podkladu a slouží k rozlišení více různých značek od sebe. Měl by být co nejjednodušší (viz kapitola 4.3) a nesmí být středově souměrný, aby bylo možné rozlišit orientaci (natočení) značky ve scéně. Tedy např. značka s kruhem uprostřed je nevhodná. Pokud používáme více značek v aplikaci s rozšířenou realitou, tyto značky by neměly být vzájemně podobné, aby nedošlo k záměně. Značky je vhodné tisknout na tvrdý, nelesknoucí se papír a případně podlepit kartonem, aby se neohýbaly. Je potřeba zvolit vhodnou velikost značky podle použití. Na obrázku 3 jsou ukázány příklady trasovacích značek, které lze rovněž najít v adresáři patterns ve formátu PDF k vytisknutí.
Konfigurační soubor
Seznam použitých značek je obvykle uložen v konfiguračním souboru object_data (v adresáři bin/Data), který se načítá při inicializaci aplikace ARToolKit. V souboru je uložen počet použitých značek a ke každé značce její pojmenování, datový soubor, šířka značky na vytištěném papíru v milimetrech (včetně okrajů) a její střed.
Tvorba vlastních značek
ARToolKit umožňuje tvorbu vlastních značek pomocí nástroje mk_patt. Tento program umožňuje vygenerovat datový soubor značky z natrénovaných dat z videokamery. Než spustíme trénování, je potřeba vhodně navrhnout symbol naší nové značky a následně značku vytisknout. Pro tvorbu značek lze použít šablonu, uloženou v souboru patterns/blankPatt.gif. Nakonec je potřeba vytvořit příslušný konfigurační soubor k vytvořeným značkám.
Trasování pomocí více značek
ARToolKit umožňuje trasování jednoho objektu pomocí více značek. Pomocí sady několika značek s vzájemně neměnnou pozicí (např. značky nalepené na pevné podložce) lze určit jedinou polohu. To lze využít v případě, kdy některá značka je mimo zorný úhel pozorovatele (videokamery). V běžném případě by objekt zmizel, ale pomocí multi značek lze pozici dopočítat. Pokud je viditelná alespoň jedna značka z dané sady, ARToolKit dokáže dopočítat pozici zbylých značek, které jsou mimo zorný úhel. Sadu multi značek je potřeba nadefinovat v konfiguračním souboru marker.dat (v adresáři bin/Data/multi), obdobně jako běžné značky. Navíc je potřeba pro každou značku nastavit transformační matici, udávající přesnou polohu v souřadnicovém systému. Správné nastavení transformační matice může být v některých případech velmi obtížné.
Vývoj aplikací v ARToolKit
ARToolKit framework
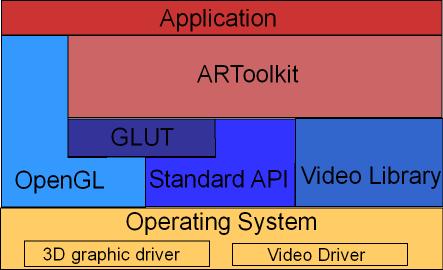
ARToolKit poskytuje funkce, které se volají v určitém pořadí a tvoří tak program s rozšířenou realitou. Některé funkce je však možné používat samostatně. ARToolKit je multiplatformní, pro renderování virtuální vrstvy používá OpenGL a pro správu událostí a oken používá GLUT. API je napsáno v jazyce C.
ARToolKit tvoří tři hlavní moduly:
- AR modul - jádro systému, zajišťující trasování značek a zpracování parametrů kamery.
- Video modul - zajišťuje snímání video obrazu.
- Gsub modul - funkce zajišťující vykreslování 3D grafiky.
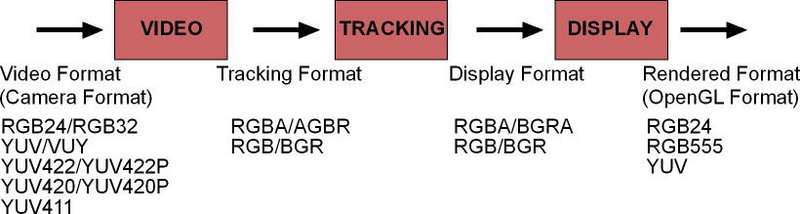
Formát obrazových dat
Jednotlivé moduly ARToolKit používají odlišné formáty obrazových dat.
Kostra zdrojového kódu aplikace
- Inicializace - inicializace a nastavení videokamery, zpracování konfiguračního souboru značek.
-
Hlavní smyčka:
- Načtení snímku z videokamery.
- Detekce trasovacích značek a rozpoznání vzorů ve snímku.
- Výpočet pozice a rotace kamery vzhledem k rozpoznaným značkám.
- Vykreslení snímku a virtuálních objektů.
-
Ukončení - ukončení snímání videokamery a vypnutí programu.
Instalace ARToolKit pro Visual Studio
Prerekvizity
- Vývojové prostředí Microsoft Visual Studio, případně Cygwin.
- Knihovna DSVideoLib, zajišťující komunikaci s ovladači videokamery (DSVideoLib je součástí instalačního balíčku ARToolKit).
- GLUT (OpenGL Utility Toolkit) runtime a SDK.
- DirectX 9.0b nebo novější.
- Videokamera nebo webkamera, podporující rozhraní USB nebo Firewire.
- OpenVRML knihovna (je součástí instalačního balíčku ARToolKit).
Instalace
- Stáhneme instalační balíček z oficiálního webu http://www.hitl.washington.edu/artoolkit/, případně balíček ARToolKit-2.7.1-bin-book.zip z adresy http://books.ascii.jp/9784048673617/, kde jsou opraveny některé zdrojové kódy, které v původní verzi způsobovaly chyby při kompilaci programů, pracujících s OpenVRML.
- Rozbalíme instalační balíček do adresáře [ARToolKit].
- Rozbalíme knihovnu DSVideoLib do adresáře „DSVL“ v [ARToolKit].
- Zkopírujeme soubory DSVL.dll a DSVLd.dll z adresáře [ARToolKit]\DSVL\bin do [ARToolKit]\bin.
- Nainstalujeme knihovny GLUT. Dll soubory zkopírujeme do systémové složky Windows „System32“. Knihovny a hlavičkové soubory umístíme do SDK adresáře Visual Studia.
- Spustíme skript [ARToolKit]\Configure.win32.bat, který vytvoří soubor include\AR\config.h.
- Otevřeme ARToolKit.sln ve Visual Studiu a sestavíme solution příkazem Build.
- Pro zprovoznění OpenVRML rozbalíme tento balíček do adresáře [ARToolKit].
- Zkopírujeme soubor js32.dll z adresáře [ARToolKit]\OpenVRML\bin do [ARToolKit]\bin.
- V konfiguračním manažeru Visual Studia povolíme projekty libARvrml a simpleVRML a znovu sestavíme příkazem Build.
Struktura ARToolKit
ARToolKit obsahuje následující adresáře:
- bin - nástroje, příklady, kalibrační soubory videokamery, konfigurační soubory značek a multi-značek, VRML modely a jejich konfigurační soubory, spustitelné programy končící sufixem „d“ jsou určeny pro ladění (debug)
- doc - dokumentace
- DSVL - soubory knihovny DSVideoLib
- examples - zdrojové soubory ukázkových aplikací
- include - hlavičkové soubory ARToolKit
- lib - knihovny a zdrojové kódy ARToolKit
- OpenVRML - soubory knihovny OpenVRML
- patterns - trasovací značky v PDF k vytisknutí
- util - zdrojové soubory nástrojů
Testovací a ukázkové aplikace
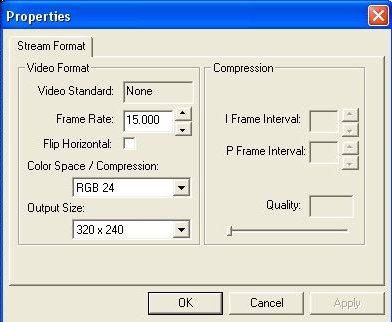
Po úspěšném sestavení solution bychom měli vyzkoušet testovací aplikace (v adresáři bin) a ověřit, zda vše správně funguje. Nejdříve bychom měli vyzkoušet grafický test graphicsTest, kterým ověříme správnou funkčnost OpenGL a GLUT. Na obrazovce by se měla po spuštění programu objevit modrá rotující konvička. Dále vyzkoušíme video test videoTest, kterým ověříme správnou funkčnost videokamery a zobrazování video výstupu na displeji. Na obrazovce by se mělo objevit okno s nastavením konfigurace kamery (podobně jako na obrázku 6) a po potvrzení a zvolení správného nastavení obraz z videokamery. Pokud oba tyto testy fungují správně, máte potvrzeno, že vaše kamera podporuje grafický modul a video modul ARToolKit.
Pro spuštění ukázkových aplikací ARToolKit je potřeba mít k dispozici vytisknuté trasovací značky (z adresáře patterns). Některé ukázkové aplikace mají implementovaný debug mode, který se zapíná/vypíná tlačítkem „d“ a zobrazuje prahovaný obraz. U některých aplikací lze nastavit manuálně hodnotu prahu pomocí tlačítka „t“. Zdrojové kódy ukázkových aplikací nalezneme v adresáři examples.
Příklady využití
- zábava, hry
- interaktivní průvodce v muzeu
- navigace v budově
- efekty ve filmu
- reklama na plakátu
Zdroje
[1] OsgART [online]. 2009 [cit. 2010-11-04]. OsgART: Augmented Reality for OpenSceneGraph. Dostupné z WWW: http://osgart.org/wiki/File:Build_artoolkit_simpletest.jpg.
[2] ARToolKit [online]. 2007 [cit. 2010-11-04]. ARToolKit Documentation - How does ARToolKit work. Dostupné z WWW: http://www.hitl.washington.edu/artoolkit/documentation/images/diagram.jpg.
[3] ARToolKit [online]. 2007 [cit. 2010-11-04]. ARToolKit Documentation - ARToolKit framework. Dostupné z WWW: http://www.hitl.washington.edu/artoolkit/documentation/images/artarchitecture.jpg.
[4] ARToolKit [online]. 2007 [cit. 2010-11-04]. ARToolKit Documentation - ARToolKit framework. Dostupné z WWW: http://www.hitl.washington.edu/artoolkit/documentation/images/formatpipeline.jpg.
[5] ARToolKit [online]. 2007 [cit. 2010-11-04]. ARToolKit Documentation - First example. Dostupné z WWW: http://www.hitl.washington.edu/artoolkit/documentation/images/configCamWindows.jpg.
[6] ARToolKit [online]. 2007 [cit. 2010-11-04]. Dostupné z WWW: http://www.hitl.washington.edu/artoolkit/.
[7] ARToolKit. In Wikipedia : the free encyclopedia [online]. St. Petersburg (Florida) : Wikipedia Foundation, 16.1.2008, last modified on 11.6.2010 [cit. 2010-11-04]. Dostupné z WWW: http://en.wikipedia.org/wiki/ARToolKit.
[8] KATO, Hirokazu. Inside ARToolKit [online]. Japan : Hiroshima City University, 2002 [cit. 2010-11-04]. Dostupné z WWW: http://www.hitl.washington.edu/artoolkit/Papers/ART02-Tutorial.pdf.
[9] KATO, Hirokazu; BILLINGHURST, Mark. Marker Tracking and HMD Calibration for a Video-based Augmented Reality Conferencing System [online]. Hiroshima City University and University of Washington : Faculty of Information Sciences and Human Interface Technology Laboratory, 1999 [cit. 2010-11-04]. Dostupné z WWW: http://www.hitl.washington.edu/artoolkit/Papers/IWAR99.kato.pdf.
[10] ARToolworks support library [online]. 2010 [cit. 2010-11-04]. ARToolKit Professional. Dostupné z WWW: http://www.artoolworks.com/support/library/ARToolKit_Professional.